Teaching suggested applications*
Programmation visuelle ou standard (Solution Wizard Easy Programming ABB) d’un robot 6 axes, Trajectoire, Suivi de courbes, création de World Zone, etc…
Mise en service, Etalonnage des axes, Activités de Maintenance et d’Entretien
Accès à l’appli RobotStudio® AR App Viewer et l’application RoboTraining (abonnement gratuit pendant 1 an) pour disposer de nombreux exercices, tuto, etc…, lien pour visualiser la vidéo de présentation : video RoboTraining
Logiciel robot studio :
100 licences flottantes du logiciel de programmation et de simulation RobotStudio®
Permet une utilisation de Robot studio à plusieurs en simultanés
Permet via VPN de se connecter au server de licence RS pour une utilisation à distance
Prendre la licence RS et la transférer sur son PC portable pendant 90 jrs max,
Incluant la réalité virtuelle et la réalité augmentée dans ses applications et l’application RoboTraining gratuite pendant 1 an
Plug and play fonction Réalité virtuelle (* hors casques OCULUS)
Application gratuite AR viewer téléchargeable gratuitement sur tablette et smartphone android ou apple pour visualiser en réalité augmentée les applications développées en classe : https://new.abb.com/products/robotics/robotstudio/ar-viewer-app
Fichier RS à convertir au format GLB pour l’application RobotStudio AR Viewer
Lien vers l’Apple Store : ICI Lien vers le Google Play Store : ICI Compris 1 semaine de formation (stage réf POC), à effectuer dans les 6 mois suivant la commande, au centre ABB ROBOTIQUE de Cergy Pontoise (95)
|
Description
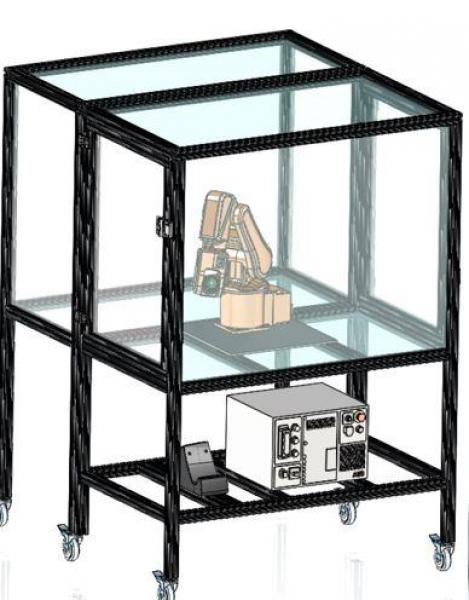
Le ROB050 permet de nombreuses activités d’étude, pilotage, programmation, maintenance & entretien d’un bras robotisé 6 axes couramment utilisé dans l’industrie automobile sur les chaînes de fabrication, pour du conditionnement type Pick & Place de produits divers, etc… Il est identique à celui monté sur notre système MLP550 Il est fourni avec son logiciel d’exploitation 3D multi-licences. L’ensemble est composé :
- D’une structure principale en aluminium anodisée, équipée de roulettes pivotantes avec frein et pieds stabilisateurs, intégrant le robot (accessible par une porte munie d’une serrure à clef), l’armoire de commande et le flexpendant logés dessous.
- D’une seconde structure, aussi sur roulettes, qui vient se fixer facilement contre la première afin de disposer d’un volume suffisant permettant un débattement maximum du robot sans risque de collision avec les parois et la possibilité d’intégrer d’autres éléments.
Les structures ont une largeur ne dépassant pas 800mm pour une hauteur de 1600mm afin de faciliter le déplacement de l’ensemble dans vos locaux. La conception robuste de cet équipement le rend parfaitement adapté pour une utilisation en milieu scolaire. La fabrication de cet équipement répond à la directive machine européenne.
|